Appearance
PalletToPut 码垛放料
机器人移动至码垛点执行放置工件动作。系统会根据示教点及设定的 X/Y/Z 偏移自动计算下一个坐标。
指令格式
PalletToPut (PalletName, [V], [B], [C]) PalletToPut (码垛名, [目标速度], [过渡类型], [过渡值]) (备注:带 [] 参数为可选参数)
参数详细说明
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
| PalletName | PALLET | 当前垛体信息变量。 | |
| [V] | SPEED | 目标速度。 | V4000 |
| [B] | enum(FINE / RELATIVE / ABSOLUTE / DEFAULT) | 过渡类型。 | FINE |
| [C] | ZONE | 过渡值。 | C100 |
应用示例
示例 1:
estun
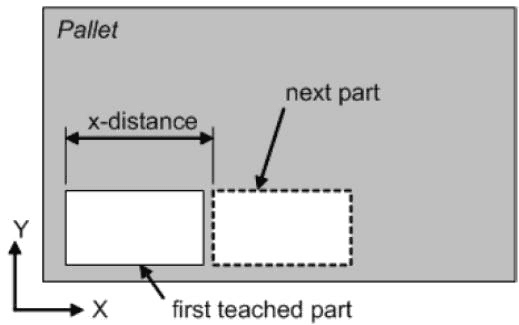
PalletToPut (PALLET1, V2000)码垛功能的垛位计算取决于示教的第一个工件位置和配置的码垛的距离。在前一个工件的位置基础上添加设定的码垛距离,从而得到下一个工件的位置,如下图所示。
计算下一个工件的位置
默认码垛的顺序从
默认码垛顺序:
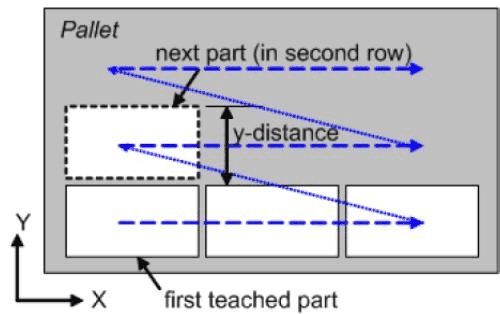
当一个新行开始放置时,在第一行工件位置的基础上添加 y 方向上的偏移即生成了新行的工件的位置数据。
这个例子里默认的码垛顺序是 x y z. 首先在 x 方向放置工件然后再进行第二行。新的一行的第一个部件从图中所示的位置开始。只要行满的,它们就会被放在下一行。在这一层的所有行都被填满后,xy 层在 z 方向重复平移,直到跺满。
进行放置时,建议路径如图下图所示:
放置路径:
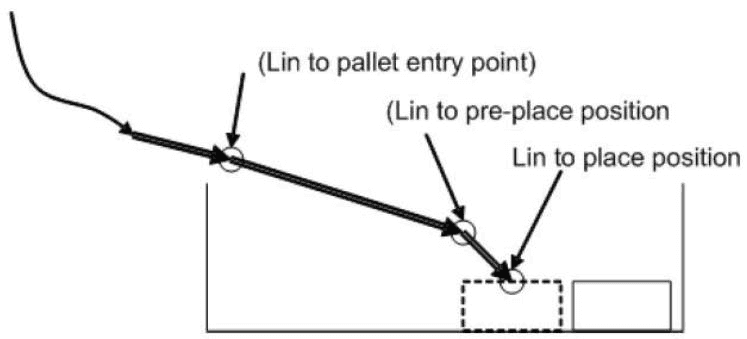
在调用 PalletToPut 指令时,执行了以下运动指令:
机器人以直线的运动方式移动至跺的进入位置(可选)
机器人以直线的运动方式移动至垛点的前点位置(可选)
机器人以直线的运动方式移动至工件的放置位置(必选)