Appearance
MovH 螺旋线运动
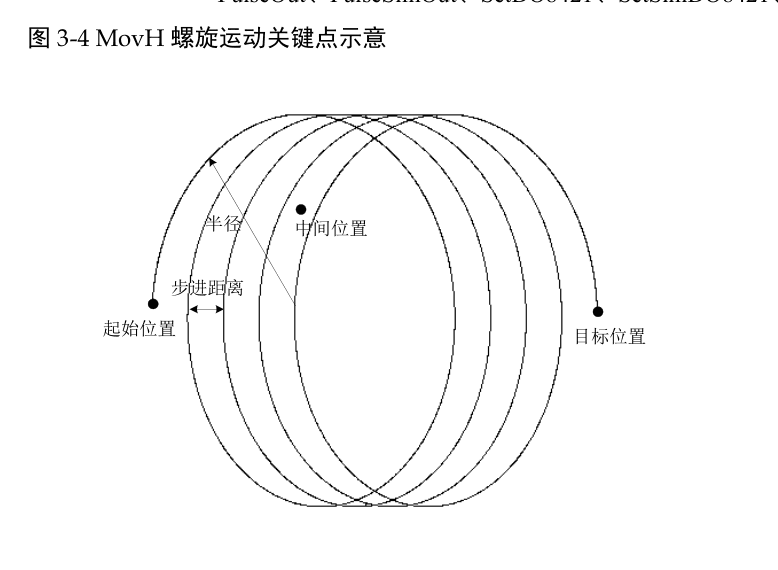
MovH 为螺旋线运动指令。该指令使机器人的 TCP 点从当前位置开始,沿着特定的螺旋路径运动到目标位置。如果起点和终点的姿态不同,机器人的姿态将在运动过程中随位置同步旋转,最终过渡到终点姿态。
运动逻辑
- 起点:上一步运动指令的终点。
- 平面与方向:由起点、辅助点 A 和目标点 P 三点共同确定螺旋运动的平面及旋进方向(顺时针或逆时针)。
- 轨迹特征:机器人并不一定会经过辅助点 A,而是以设定的半径 R 和步进距离 S 向终点旋进。
指令格式
MovH(A, P, [V], [B], [C], [Tool], [Coord], [PayLoad], R, S, [DO])
MovH(中间点, 目标点, [速度], [平滑], [姿态], [工具], [坐标系], [负载], 螺旋半径, 螺距, [端口输出])
(备注:带 [] 参数为可选参数)
参数详细说明
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
| A | APOS 或 CPOS 变量 | 辅助点,用于确定螺旋平面和旋进方向。 | 必填 |
| P | APOS 或 CPOS 变量 | 坐标系下的最终目标位置。 | 必填 |
| [V] | SPEED 变量 | 指定机器人执行螺旋运动的速度。螺旋线的最大轨迹线速度限制为系统最大速度的 0.25 倍。 | 可选 |
| [B] & [C] | - | MovH 指令不支持过渡运动。参数 [B] 需设为 FINE,参数 [C] 不起作用。 | 可选 |
| [Tool] | TOOL 变量 | 机器人执行该轨迹时使用的工具参数。 | 可选,默认使用当前系统中设置的工具参数 |
| [Coord] | USERCOOR 变量 | 机器人执行该轨迹时使用的用户坐标系。 | 可选,默认使用当前系统中设置的坐标系参数 |
| [PayLoad] | PAYLOAD 变量 | 机器人执行该轨迹时使用的工件负载参数。 | 可选,默认使用当前系统中设置的负载参数 |
| R | real | 螺旋线的半径(单位:mm)。 | 必填 |
| S | real | 螺旋旋转一周(360°)后,沿起终点矢量方向移动的位移距离(单位:mm)。 | 必填 |
| [DO] | string | 运动完成后触发的 IO 指令(如 SetDO、PulseOut 等)。 | 可选 |
注意事项
- 不支持过渡:该指令执行时会自动打断路径过渡。
- 不支持 WaitFinish:指令执行逻辑较为独立。
应用示例
指令代码:
estun
MovL (P1, V50, "RELATIVE", C50)
MovH (P2, P3, V100, "FINE", nullTool, World, PayLoad0, 10, 5)执行过程解析:
- 机器人首先运动到 P1 点。
- 以 P1 为起点,参考 P1、P2、P3 确定的平面开始螺旋运动。
- 螺旋参数:半径为 10mm,每旋绕一圈向前进 5mm。
- 方向控制:由 P2 点的位置决定是顺时针还是逆时针旋进。
- 终点:最终到达 P3 点完成螺旋动作。