Appearance
MovLArch 直线拱形运动
MovLArch 是 SCARA 机型专用的直线拱形运动指令。与 MovArch 的区别在于其水平段轨迹采用 MovL(直线插补) 方式完成。
该指令将整个取放动作分解为:垂直抬升 -> 直线平移 -> 垂直下降。通过这种方式,机器人可以在高速运动中精准避开平面障碍物。
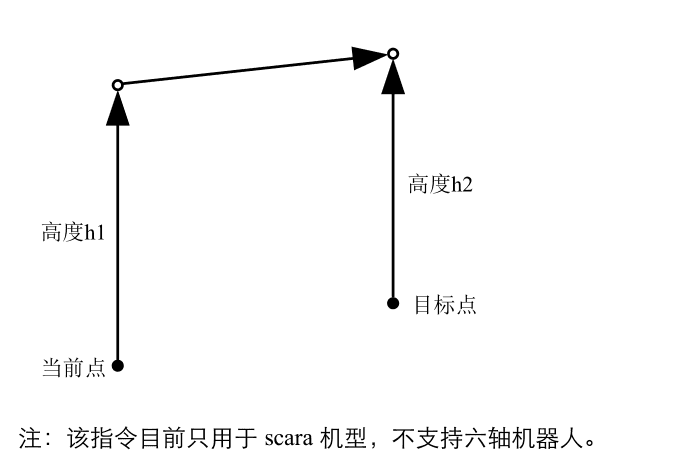
SCARA 机型的直线拱形运动指令,即以 MovL 的形式走完轨迹。整个运动过程为:首先机器人在当前点抬升 h1 高度,其后再以 MovL 的方式运动到距离目标点高度为 h2 处,最后再下降 h2 高度到达目标点,完成一次拱形运动。与正常的运动指令相同,在执行完该指令时可以附加进行 IO 操作,该指令的目标速度为百分比。
指令格式
MovLArch(P, [V], [B], [C], [Tool], [Coord], [PayLoad], [HeightType], H, H2, AbsHeight, Z, [O], [DO])
MovLArch(目标点, [速度], [平滑], [姿态], [工具], [坐标系], [负载], [高度类型], 起跳高度, 落地高度, 绝对高度, 目标Z, [姿态控制], [端口输出])
(备注:带 [] 参数为可选参数)
参数详细说明
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
| P | APOS 或 CPOS 变量 | 坐标系下的最终终点位置。 | 必填 |
| [V] | SPEED 变量 | 此指令下仅 per(速度百分比)分量有效。 | 可选,默认 V4000 |
| [HeightType] | enum(RELATIVE / ABSOLUTE) | RELATIVE(默认):相对高度,抬升和下降数值基于起点和终点的 ABSOLUTE:绝对高度,机器人抬升至用户坐标系中指定的绝对高度值。 | 可选,默认 RELATIVE |
| H / H2 | real | H(Lift High):从起点抬升的高度。 H2(Drop High):下降到目标点的高度增量。 仅在 RELATIVE 类型下有效。 | 必填 |
| AbsHeight | real | 仅在 ABSOLUTE 类型下有效。 | 必填 |
| Z | ZONE 变量 | 控制拱形运动中"垂直转向水平"以及"水平转向垂直"拐角处的平滑度。 | 必填 |
| [O] | enum(GOVRON / GOVROFF) | GOVRON(默认):受全局速度倍率影响。GOVROFF:不受全局倍率影响,按指令设定速度全速运行。 | 可选,默认 GOVRON |
| [DO] | string | 执行完该指令后可触发的 IO 指令(如 SetDO 等)。 | 可选 |
应用示例
指令代码:
estun
MovL (P1, V50, "RELATIVE", C50)
MovLArch (P2, V100, "FINE", "RELATIVE", 10, 20, C100)执行过程:
- 机器人先以 V50 速度直线运动至 P1 点。
- 垂直抬升:从 P1 点向上运动 10mm(到达
)。 - 直线平移:以直线轨迹(MovL 方式)运动至 P2 点上方 20mm 处(到达
)。 - 垂直下降:向下运动 20mm 到达 P2 终点。
- 过渡:整个运动过程中的轨迹拐弯处均以 C100 设置的参数进行平滑过渡。