Appearance
PalletFromGet 码垛取料离开
该指令用于抓取工件动作完成后离开。机器人执行该指令时,会从抓取工件的码垛点撤离至安全位置。
指令格式
PalletFromGet (PalletName, [V], [B], [C]) PalletFromGet (码垛名, [目标速度], [过渡类型], [过渡值]) (备注:带 [] 参数为可选参数)
参数详细说明
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
| PalletName | PALLET | 当前垛体信息变量。 | |
| [V] | SPEED | 用于指定机器人执行时的速度(包括末端平移、旋转及外部轴速度)。 | V4000 |
| [B] | enum(FINE / RELATIVE / ABSOLUTE / DEFAULT) | 机器人逼近终点时的过渡方式。 | FINE |
| [C] | ZONE | 机器人逼近终点时的过渡值。 | C100 |
应用示例
示例 1:
estun
PalletFromGet (PALLET1, V2000)
// 机器人抓取工件后,以 2000mm/s 的速度从 PALLET1 的码放点离开运动逻辑与路径规划
抓取过程中,路径的规划建议如图所示:
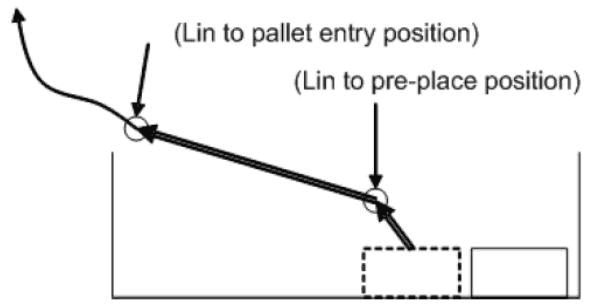
在调用 PalletFromGet 指令时,执行了以下运动指令:
- 移动至后点位置(Post-point):从抓取点撤离的第一个中间过渡点(可选)。通常设置为抓取点正上方一定高度,以确保工件垂直提升。
- 移动至进入位置(Entry-point):码垛区域的边缘或安全起始位置(可选)。
如果垛点的后点和进入位置都没有被设置,执行 PalletFromGet 指令时,机器人保持当前的姿态不变。