Appearance
MovCircle 整圆指令
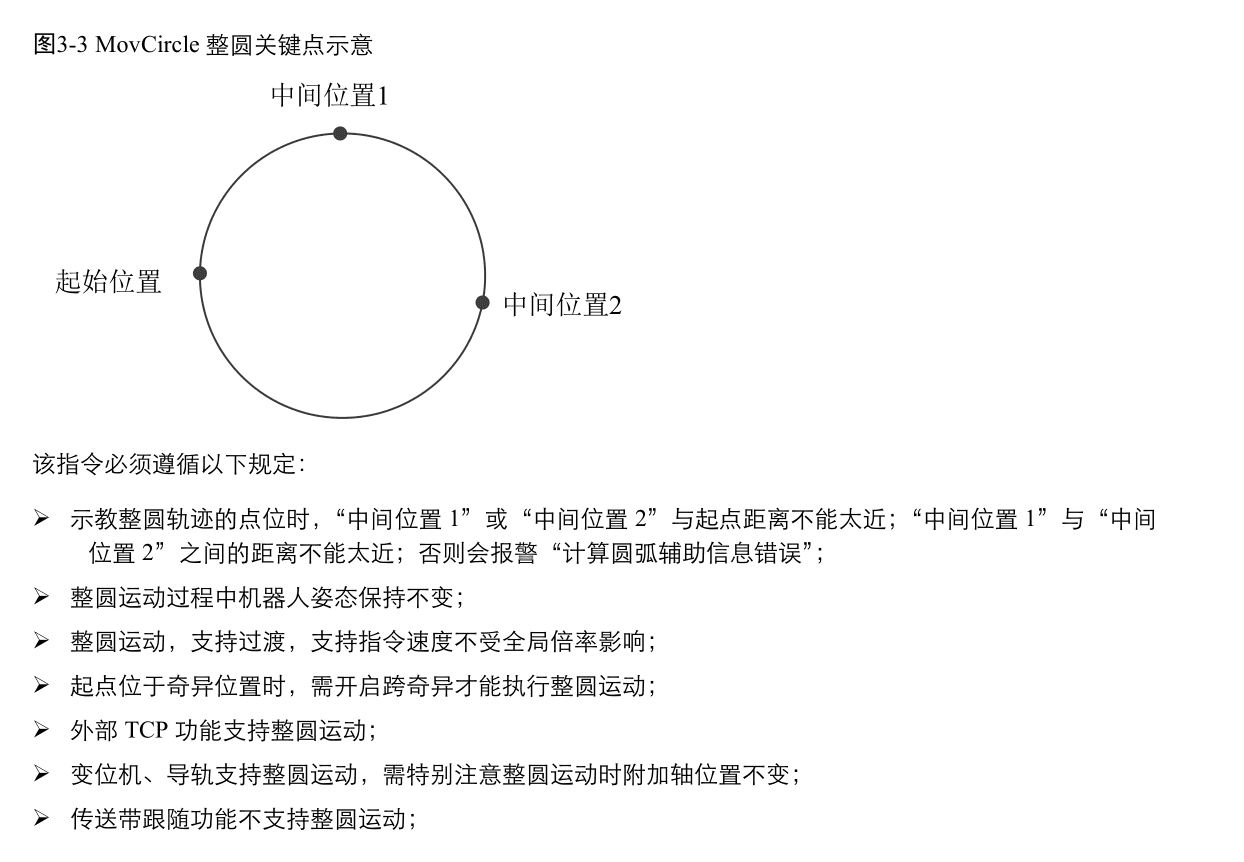
整圆指令指机器人 TCP 点从起始位置,经过辅助点 1 与辅助点 2 位置回到起始位置做整圆运动。在整圆运动过程中,机器人的姿态保持不变。
指令格式
MovCircle(A, P, [V], [B], [C], [Tool], [Coord], [PayLoad], [O], [DO])
MovCircle(中间点, 目标点, [速度], [平滑], [姿态], [工具], [坐标系], [负载], [姿态控制], [端口输出])
(备注:带 [] 参数为可选参数)
参数详细说明
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
| A | APOS 或 CPOS 变量 | 整圆中间辅助点位置 1,用于确定圆弧大小和运动方向,该点的姿态不会影响最终轨迹的运行。 | 必填 |
| P | APOS 或 CPOS 变量 | 整圆中间辅助点位置 2,用于确定圆弧大小和运动方向,该点的姿态不会影响最终轨迹的运行。 | 必填 |
| [V] | SPEED 变量 | 用于指定机器人执行 MovCircle 时的速度,包括机器人末端的平移速度、旋转速度以及外部轴的移动速度等。SPEED 变量中的 tcp、ori 分量有效;有外部轴时,exj_l、exj_r 分量有效。 | 可选,默认 V4000 |
| [B] | enum(FINE / RELATIVE / ABSOLUTE / DEFAULT) | 机器人逼近终点时的过渡方式:FINE:无过渡。RELATIVE:相对过渡。ABSOLUTE:绝对过渡。DEFAULT:缺省类型。 | 可选,默认 FINE |
| [C] | ZONE 变量 | 机器人逼近终点时的过渡值。 | 可选,默认 C100 |
| [Tool] | TOOL 变量 | 机器人执行该轨迹时使用的工具参数。 | 可选,默认使用当前系统中设置的工具参数 |
| [Coord] | USERCOOR 变量 / EXTTCP 变量 / 变位机变量 | 机器人执行该轨迹时使用的用户坐标系 / 外部 TCP 坐标系 / 变位机坐标系。 | 可选,默认使用当前系统中设置的坐标系参数 |
| [PayLoad] | PAYLOAD 变量 | 机器人执行该轨迹时使用的工件负载参数。 | 可选,默认使用当前系统中设置的负载参数 |
| [O] | enum(GOVRON / GOVROFF) | GOVRON:本段轨迹受全局速度倍率影响。GOVROFF:本段轨迹不受全局速度倍率影响。 | 可选,默认 GOVRON |
| [DO] | string | 机器人执行完该指令后,可触发的 IO 操作,目前支持的 IO 指令有:SetDO、SetAO、SetSimDO、SetSimAO、PulseOut、PulseSimOut、SetDO8421、SetSimDO8421、SetDIEdge、SetSimDIEdge。 | 可选 |
应用示例
示例 1:
estun
MovCircle(P1, P2, 100, 10, 1, 1, 0, 1, 0, DO1)机器人从当前位置出发,经过中间点 P1,最终运动到目标点 P2,形成一段圆弧轨迹。