Appearance
POSCFG
位置形态配置类型
机器人在相同的笛卡尔空间位置下,可以具备多种关节位置组合(对应机器人逆解的多解)。该属性用于定义空间目标点对应的形态配置数据。
由于逆解存在多解性,同一个 XYZ 空间点,机器人可以用不同的“姿势”到达,POSCFG 就是用来唯一锁定姿态的。
- mode: 动力学模式(0~7),由
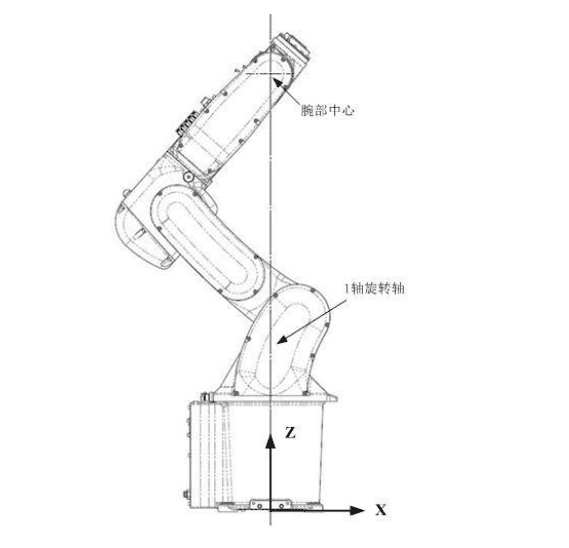
flag1、flag3、flag5组合计算得出(公式:)。 - flag1 (Wrist center): 定义手腕中心相对于 1 轴中心的前后关系(Front/Back)。
- flag3 (Axis3): 定义 2、3 轴的弯曲状态(正向/反向倾斜)。
- flag5 (Axis5): 定义 5 轴的角度范围(正号/负号区间)。
- cf1 ~ cf6: 象限值。定义各关节轴落在哪个旋转区间(如
为第 0 象限,以此类推),用于处理转动超过 360 度的轴。
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
mode | int | — | |
cf1 | int | 关节 1 号轴角度所在的象限取值。 | — |
cf2 | int | 关节 2 号轴角度所在的象限取值。 | — |
cf3 | int | 关节 3 号轴角度所在的象限取值。 | — |
cf4 | int | 关节 4 号轴角度所在的象限取值。 | — |
cf5 | int | 关节 5 号轴角度所在的象限取值。 | — |
cf6 | int | 关节 6 号轴角度所在的象限取值。 | — |
这些象限取值划分如下:
非负数:0:(-pi,pi],1:(pipi],2:(3pipi],...; 每象限间相差 2pi
负数:-1:(-3pi,-pi],-2:(-5pi,-3pi],...;每象限间相差 -2pi
- 通用六关节运动学 mode 定义
| Mode | 腕部中心相对于一轴轴心的关系 (flag1) | Axis3 (flag3) | Axis5 (flag5) |
|---|---|---|---|
| 定义 | 0: 在前;1: 在后 | 0: [0, 180°] 1: (-180°, 0°) | 0: [0, 180°] 1: (-180°, 0°) |
| 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 1 |
| 2 | 0 | 1 | 0 |
| 3 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 |
| 5 | 1 | 0 | 1 |
| 6 | 1 | 1 | 0 |
| 7 | 1 | 1 | 1 |
注:
aa、腕部中心相对于一轴轴心的关系如图,在前:指在图示 x 的正方向;在后:指在图示
bb、Axis3(flag3) 的含义为:二三轴在一条直线上为边界条件,以此前倾为 0,后仰为 1。
cc、Axis5(flag5) 的含义:即五轴的角度。
- SCARA 运动学 mode 定义
Scara 运动学存在两组解,定义 mode 值为 0 和 1,含义如下表
| Mode | Axis2 (flag2) |
|---|---|
| 定义 | 0: [0, 180°] 1: (-180°, 0°) |
| 0 | 0 |
| 1 | 1 |
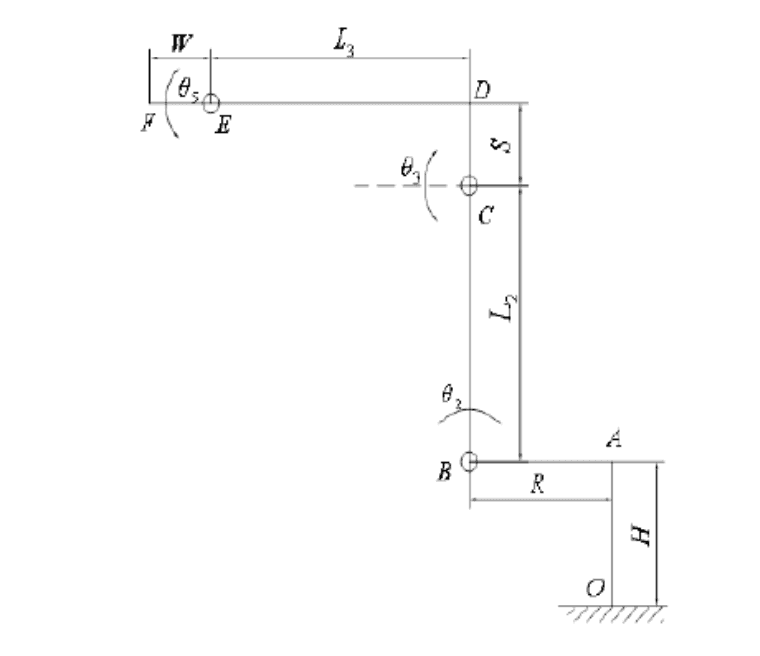
- 三轴平面机器人运动学 + “3+1” 机器人 Mode 定义
| Mode | Axis2 (flag2) |
|---|---|
| 定义 | 0: [0, 180°] 1: (-180°, 0°) |
| 0 | 0 |
| 1 | 1 |
- 吊装 SCARA 运动学 Mode 定义
吊装 SCARA 运动学存在两组解,定义 mode 值为 0 和 1。
| Mode | Axis2 (flag2) |
|---|---|
| 定义 | 0: [0, 180°] 1: (-180°, 0°) |
| 0 | 0 |
| 1 | 1 |