Appearance
MovJ 关节进行点到点
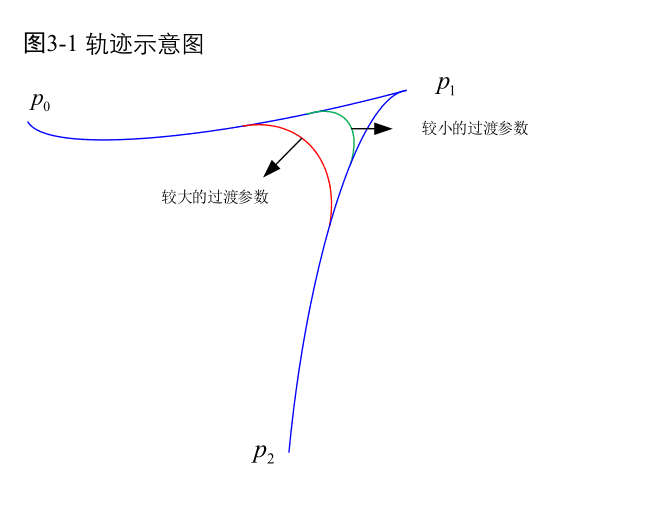
该指令表示机器人各个关节进行点到点的运动(point to point),机器人的末端轨迹为不规则的曲线,并且在该指令运行结束时可进行 IO 指令的操作。
指令格式
MovJ(P, [V], [B], [C], [Tool], [Coord], [PayLoad], [O], [CTV], [DO])
MovJ(目标点, [速度], [平滑], [姿态], [工具], [坐标系], [负载], [姿态控制], [连续轨迹速度], [端口输出])
(备注:带 [] 参数为可选参数)
参数详细说明
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
| P | APOS 或 CPOS 变量 | 坐标系下的目标点位置。 | 必填 |
| [V] | SPEED 变量 | 用于指定机器人执行 MovJ 时的速度,包括机器人末端的平移速度、旋转速度以及外部轴的移动速度等。SPEED 变量中的 per 分量有效;有外部轴时,exj_l、exj_r 分量有效。 | 可选,默认 V4000 |
| [B] | enum(FINE / RELATIVE / ABSOLUTE / DEFAULT) | 机器人逼近终点时的过渡方式:FINE:无过渡。RELATIVE:相对过渡。ABSOLUTE:绝对过渡。DEFAULT:缺省类型。 | 可选,默认 FINE |
| [C] | ZONE 变量 | 机器人逼近终点时的过渡值。 | 可选,默认 C100 |
| [Tool] | TOOL 变量 | 机器人执行该轨迹时使用的工具参数。 | 可选,默认使用当前系统中设置的工具参数 |
| [Coord] | USERCOOR 变量 | 机器人执行该轨迹时使用的用户坐标系。 | 可选,默认使用当前系统中设置的坐标系参数 |
| [PayLoad] | PAYLOAD 变量 | 机器人执行该轨迹时使用的工件负载参数。 | 可选,默认使用当前系统中设置的负载参数 |
| [O] | enum(GOVRON / GOVROFF) | GOVRON:本段轨迹受全局速度倍率影响。GOVROFF:本段轨迹不受全局速度倍率影响。 | 可选,默认 GOVRON |
| [CTV] | CTV 变量 | 机器人无限旋转轴与无限旋转速度。 | 可选,默认不开启无限旋转 |
| [DO] | string | 机器人执行完该指令后,可触发的 IO 操作:NULL:无任何操作。IO 指令:执行 IO 操作,目前支持的 IO 指令有 SetDO、SetAO、SetSimDO、SetSimAO、PulseOut、PulseSimOut、SetDO8421、SetSimDO8421、SetDIEdge、SetSimDIEdge。 | 可选 |
应用示例
示例 1:
MovJ (P1, V50, "RELATIVE", C100)
机器人以 V50 的速度运行到 P1 点,并与下一轨迹存在过渡,过渡值为 C100。
示例 2:
MovJ (P2, V50, "RELATIVE", C0) Do SetDO(DO0,0)
机器人以 V50 的速度运行到 P2 点,且无过渡,运行至 P2 点时,设置 DO0 变量对应 IO 端口为 0。
示例 3:
estun
MovJ (P1, V50, "RELATIVE", C100, nullTool, World)
MovJ (P2, V50, "RELATIVE", C100, Tool1, UserCoord1)机器人以 50 的速度运动到 P1 点,其后由于 P2 点坐标系与 P1 点不一致,故在运动到 P2 前会先自动将工具参数切换成 Tool1,用户坐标系切换成 UserCoord1,其后运动到 P2。由于自动切换了坐标系,从 P1 运动到 P2 的过程中无过渡效果。
示例 4:
estun
MovJ (P1, V50, "RELATIVE", C100, Tool1, UserCoord1)
MovL (P2, V50, "RELATIVE", C100, Tool1)机器人以 50 的速度运动到 P1 点,其后由于 P2 点坐标系与 P1 点一致,无需切换坐标系,机器人会以过渡的方式运行到 P2。