Appearance
WEAVE
该变量用于存储机器人走直线/圆弧轨迹摆动时的一些配置参数。同时可支持用户在全局,工程,程序三大变量作用域中对该变量进行创建,删除,修改等操作。
| 参数 | 类型 | 说明 | 默认值/备注 |
|---|---|---|---|
Type | int | 机器人摆动类型,该为 1 表示正弦摆,该值为 2 表示三角摆。 | — |
Freq | real | 机器人摆动时的频率,单位:Hz。 | — |
Amp_L | real | 机器人摆动左幅值,单位:mm。 | — |
Amp_R | real | 机器人摆动右幅值,单位:mm。 | — |
StopTime_L | int | 波峰处停止时间,指在摆动到左幅值时停止的时间,单位是 ms。 | — |
StopTime_C | int | 中间位置停止时间,指在摆动到中间位置时摆动停止的时间,单位是 ms。 | — |
StopTime_R | int | 波谷处停止时间,指在摆动到右幅值时停止的时间,单位是 ms。 | — |
RotAngle_X | real | 摆动基准平面绕摆动行进方向旋转的角度,该参数用于决定最终的摆动平面,单位是 deg。 | — |
RotAngle_Z | real | 绕摆动平面的法向量旋转的角度,决定摆弧的形状,单位:deg | — |
DelayType_L | int | 波峰处停止使能,指在摆动到左幅值时停止使能,该值为 0 表示使能失效,该值为 1 表示使能有效。 | — |
DelayType_C | int | 中间位置处停止使能,指在摆动到中间位置时停止使能,该值为 0 表示使能失效,该值为 1 表示使能有效。 | — |
DelayType_R | int | 波谷处停止使能,指在摆动到右幅值时停止使能,该值为 0 表示使能失效,该值为 1 表示使能有效。 | — |
note | string | 变量注释。 | — |
注意
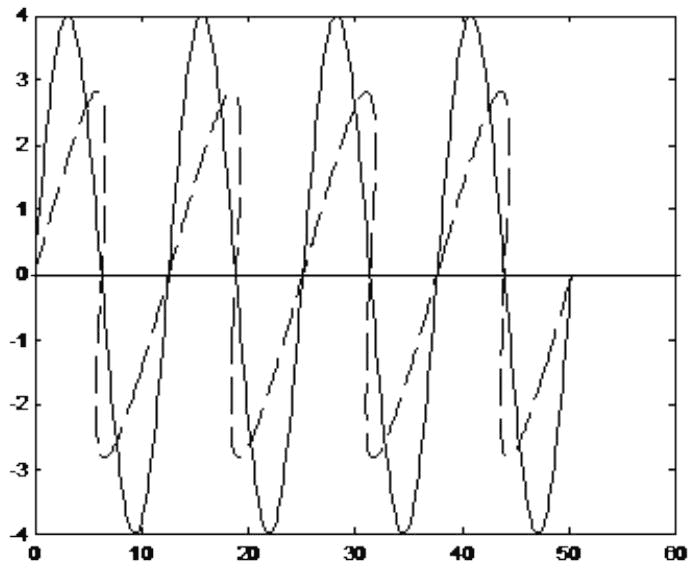
由行进路线与工具坐标系的
RotAngle_Z 的作用,如下图所示:RotAngle