Appearance
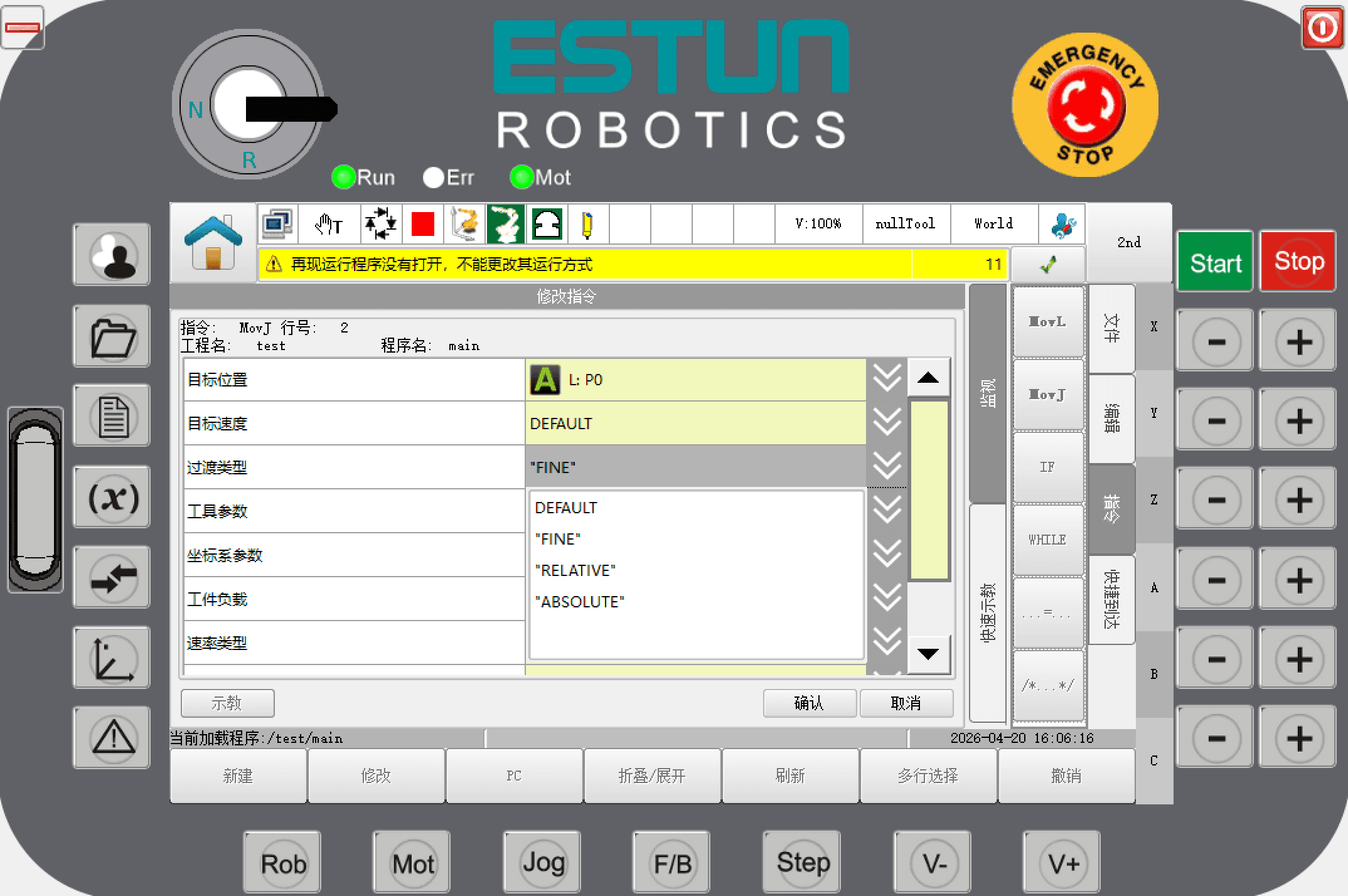
DEFAULT 默认
通常这是一个全局预设值。
- 动作逻辑: 它是系统参数中设定的默认过渡方式(通常厂家默认会带一点圆滑,或者直接指向 FINE)。
- 路径特点: 取决于系统后台的配置。
FINE (精确定位)
这是最基础的类型。
- 动作逻辑: 机器人必须到达目标点的物理坐标点,且轴的运动速度完全降为 0,确认到位后才执行下一条指令。
- 路径特点: 动作会有明显的“停顿感”。
- 适用场景: 需要极高位置精度的场合,如:装配、点焊、抓取工件的瞬间。
RELATIVE (相对百分比过渡)
- 概念:RELATIVE 是一种相对过渡(Relative/Blend Path)。
- 特性:机器人不在目标点精确停下,而是在接近目标点时,根据设定的平滑距离参数(如
[R, 100],即圆弧距离),平滑地转弯至下一个动作。 - 特点:
- 运动:连续不间断,速度波动小。
- 轨迹:经过一个弯角(圆弧过渡),平滑平滑,非直线。
- 适用场景:轨迹涂胶、弧焊、连续码垛等需要高运动效率、连续运行的工序。
ABSOLUTE(绝对半径过渡)
这是一种基于距离的平滑方式。
- 动作逻辑: 你需要设定一个具体的数值(例如 50mm)。当机器人进入距离目标点 50mm 的范围内时,就开始向下一个点转弯。
- 路径特点: 机器人不会经过目标点的中心,而是切出一道弧线。数值越大,弧度越平滑,偏离目标点越远。
- 适用场景: 涂胶、切割、或者单纯为了缩短节拍(Cycle Time)的中间过渡点。
总结对比
| 类型 | 是否停顿 | 轨迹精度 | 运行效率 | 核心特征 |
|---|---|---|---|---|
| FINE | 是 | 最高 | 最低 | 必须完全停稳,点对点到位 |
| ABSOLUTE | 否 | 中等 | 高 | 按物理距离(mm)提前转弯 |
| RELATIVE | 否 | 较低 | 最高 | 按比例(%)提前转弯 |
| DEFAULT | 取决于设置 | - | - |